Admittance Control of KUKA LBR iiwa 14 Robot arm for Augmented Reality based rehabilitation.
ROS + KUKA + ATI EtherCAT F/T Sensor in Admittance Controller for AR based rehabilitation.
Learn moreM.S. Robotics and Autonomous Systems, Arizona State University
B.Tech. Electronics and Communication , National Institute of Technology Calicut
ROS + KUKA + ATI EtherCAT F/T Sensor in Admittance Controller for AR based rehabilitation.
Learn more
Robust VIC Parameter Optimization using Bayesian Optimization and Student-t Process Regression.
Learn more
Real-Time Image Processing and Audio Processing.
DJI Tello Control to classify objects in vision, identify obstacles and interpret hand pose to navigate.
Learn more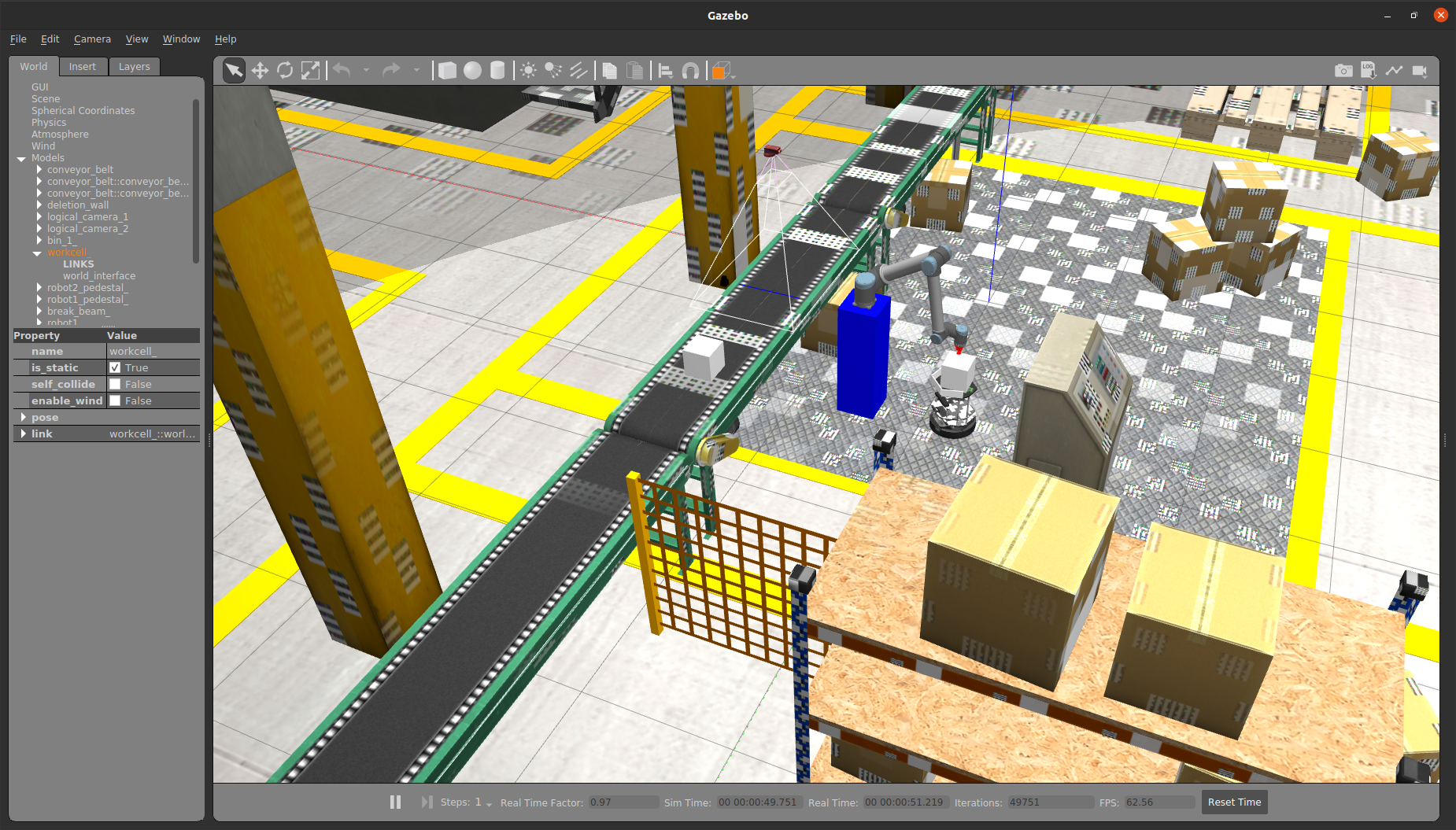
Motion Planning a UR5 6DOF Manipulator for conveyor belt operation and Turtlebot for autonomous local distribution in ROS with Python.
Learn more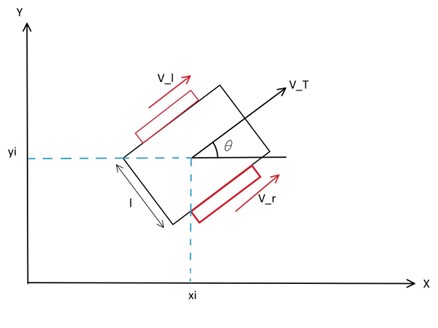
Multi-Robot grasping and transportation strategy in MATLAB.
Learn more
Hardware design, fabrication, and testing of a multi-microcontroller training kit employing Autodesk EAGLE, as an innovative approach to embedded programming training.
Learn more