Gautham Manoharan
System Integration: Manipulation and Autonomous Local Distribution for Industrial Automation
Motion Planning a UR5 6DOF Manipulator for conveyor belt operation and Turtlebot for autonomous local distribution in ROS with Python
Factory Environment in ROS Gazebo
Work
- Simulated control architecture and system state design for Motion Planning of UR5 6DOF Manipulator in ROS Gazebo for vision based smart part picking on a conveyor belt, and autonomous navigation of TurtleBot on factory floor with LiDAR point cloud maps.
- Utilized MoveIt to control the UR5 manipulator with a suction gripper.
- Used RViz navigation stack and the TF library to setup LiDAR Point Cloud Based autonomous SLAM on Turtlebot.
- Part picking is dynamic and based on real-time detection by cameras.
- Leveraged FlexBE for state machine design to integrate all componenets together for part picking and delivery to target location by the Turtlebot.
Images
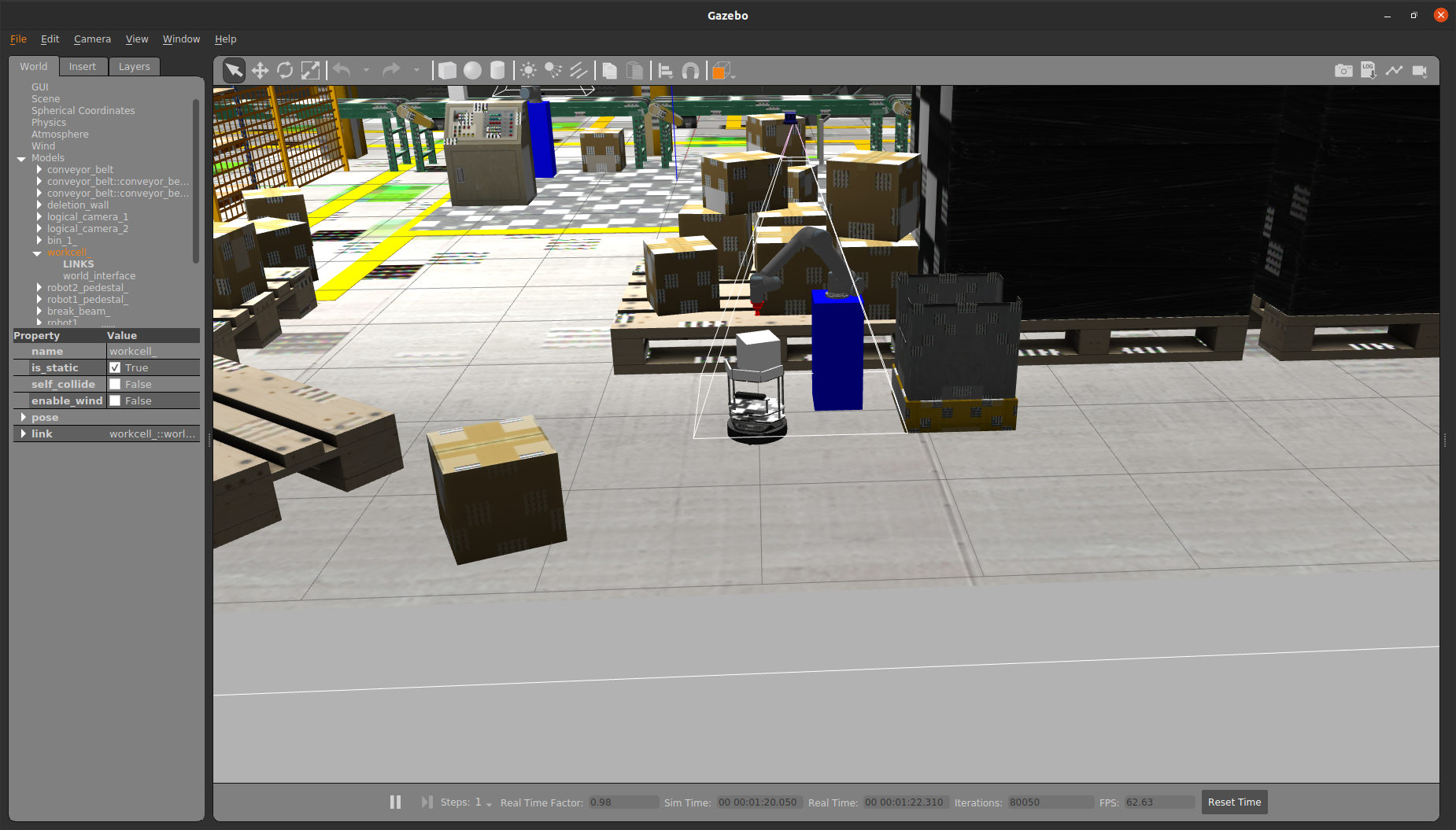
Manipulator placing the part on the Turtlebot:
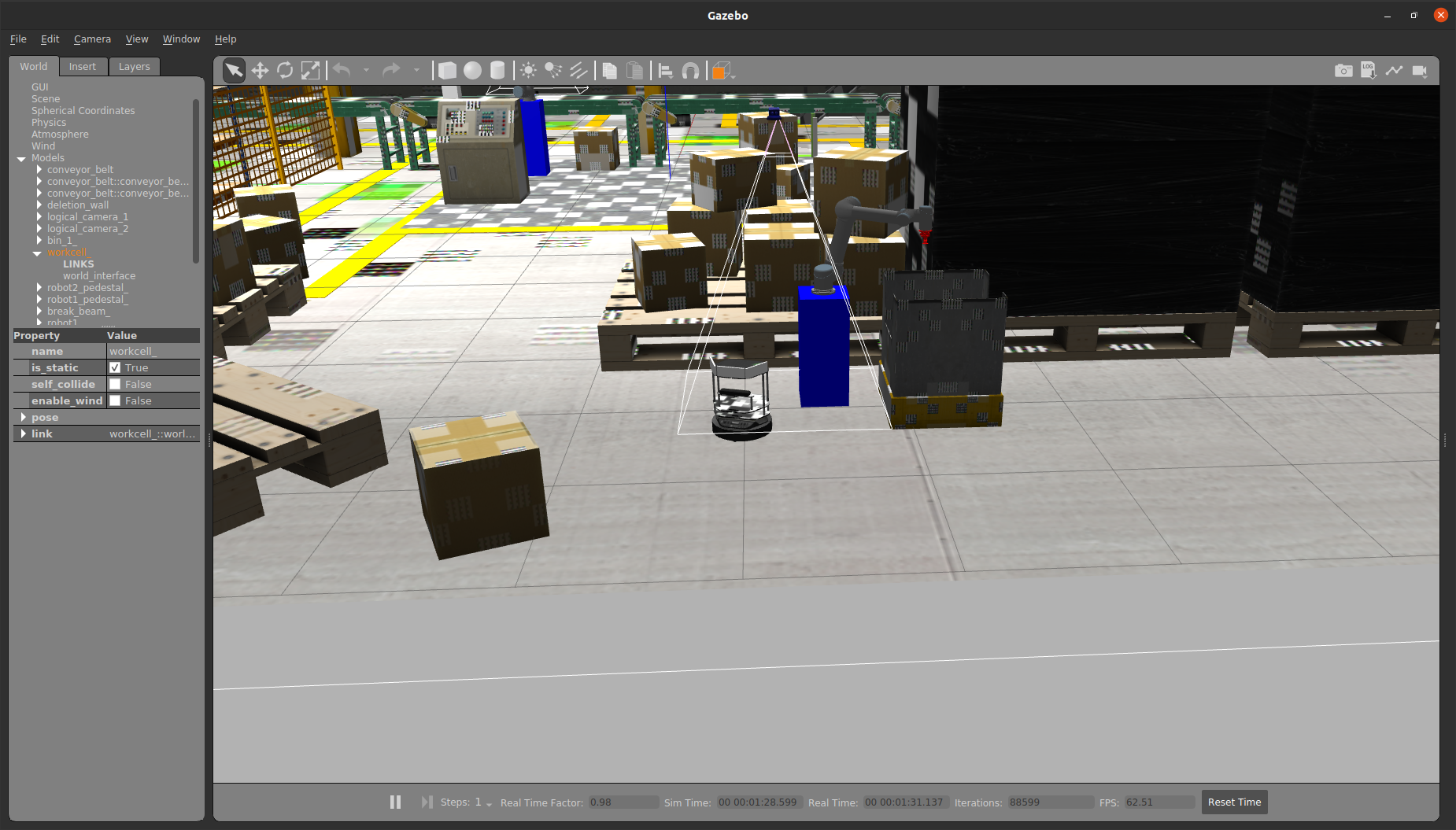
Turtlebot navigation to target location:

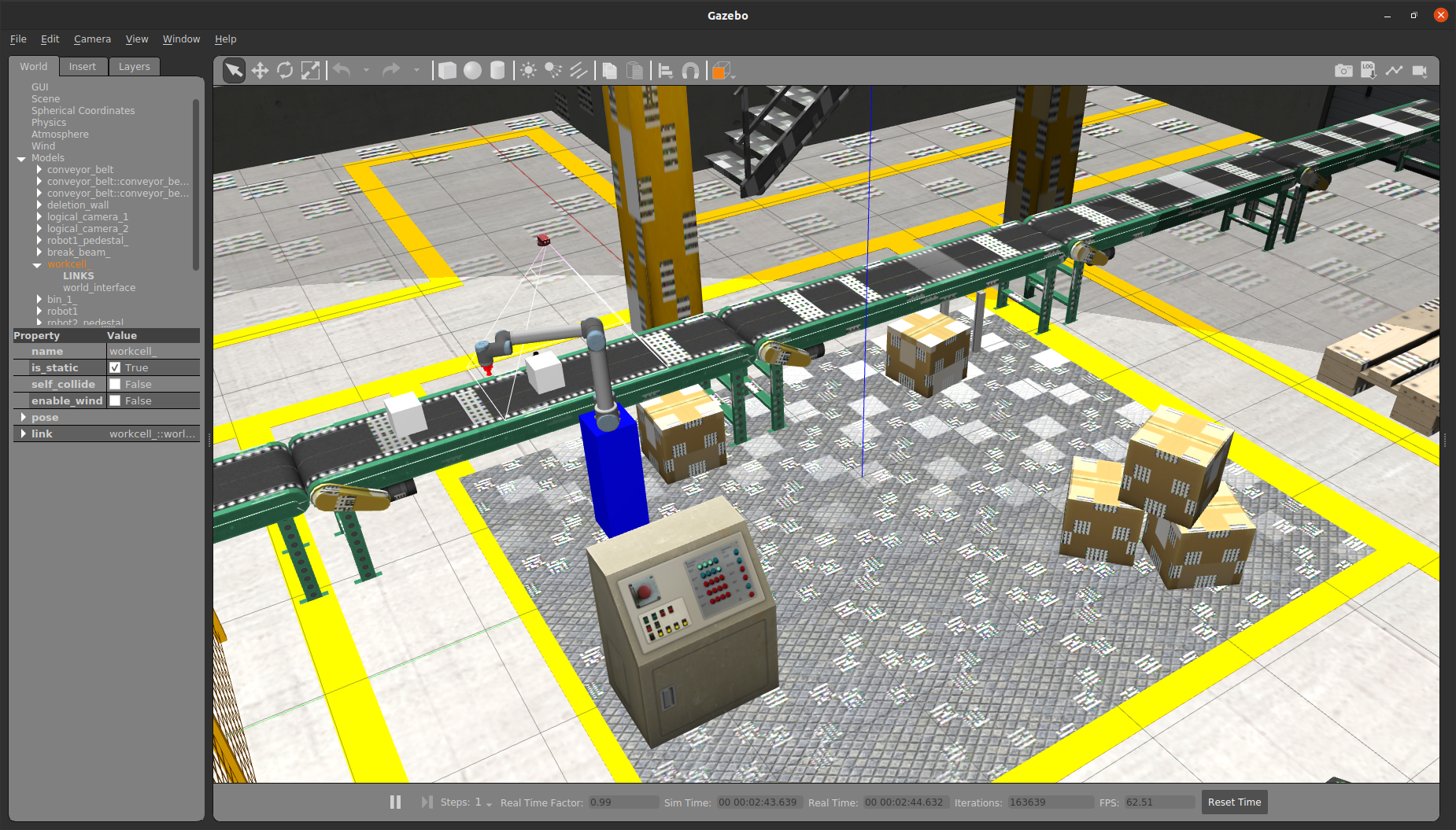
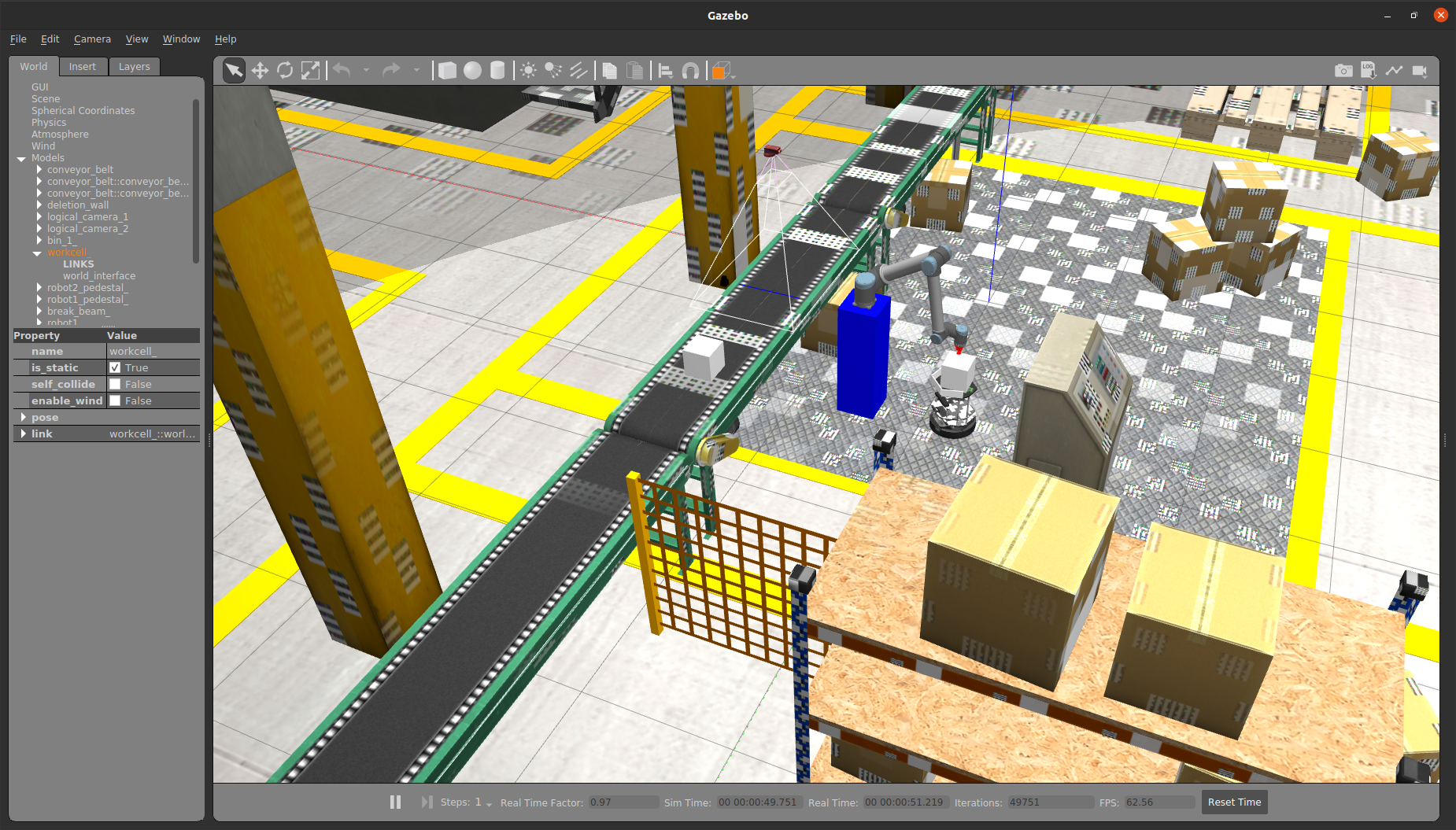
Second Manipulator picks part from the turtlebot to drop in the bin: