Gautham Manoharan
Multi-Robot Object Transport Using Potential Field and Symmetric Formation Control
Multi-Robot grasping and transportation strategy in MATLAB
Work
- Managed team to produce a multi-robot grasping and transportation strategy in MATLAB.
- Implemented potential field-based obstacle avoidance and navigation for six differential drive robots.
- Additionally, designed graph-based formation control in the Robotarium Simulator.
Videos and Images
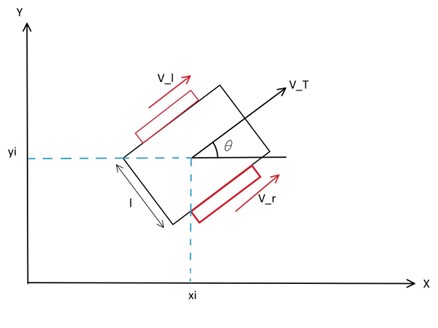
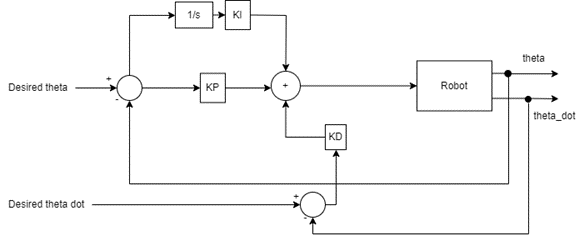
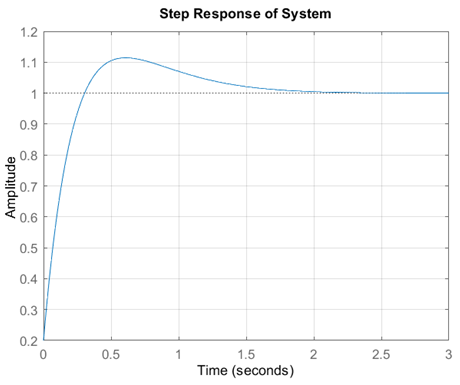
Differential Drive Robot and PID Controller:
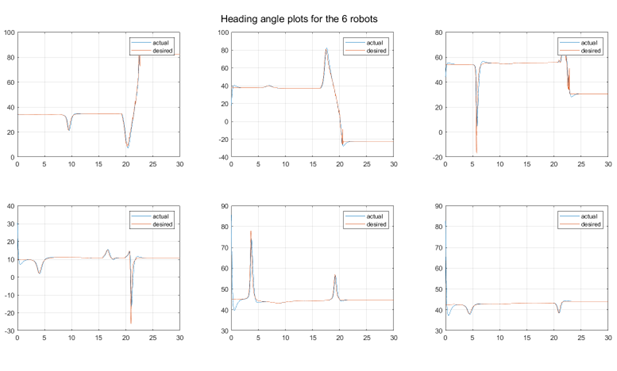
Robot navigation in the obstacle field: