Gautham Manoharan
Admittance Control of KUKA LBR iiwa 14 Robot arm for Augmented Reality based rehabilitation
ROS + KUKA + ATI F/T sensor for Admittance Control of KUKA 7 DOF Robot arm. To be integrated with Unity and Microsoft HoloLens to create an AR platform for rehabilitation.
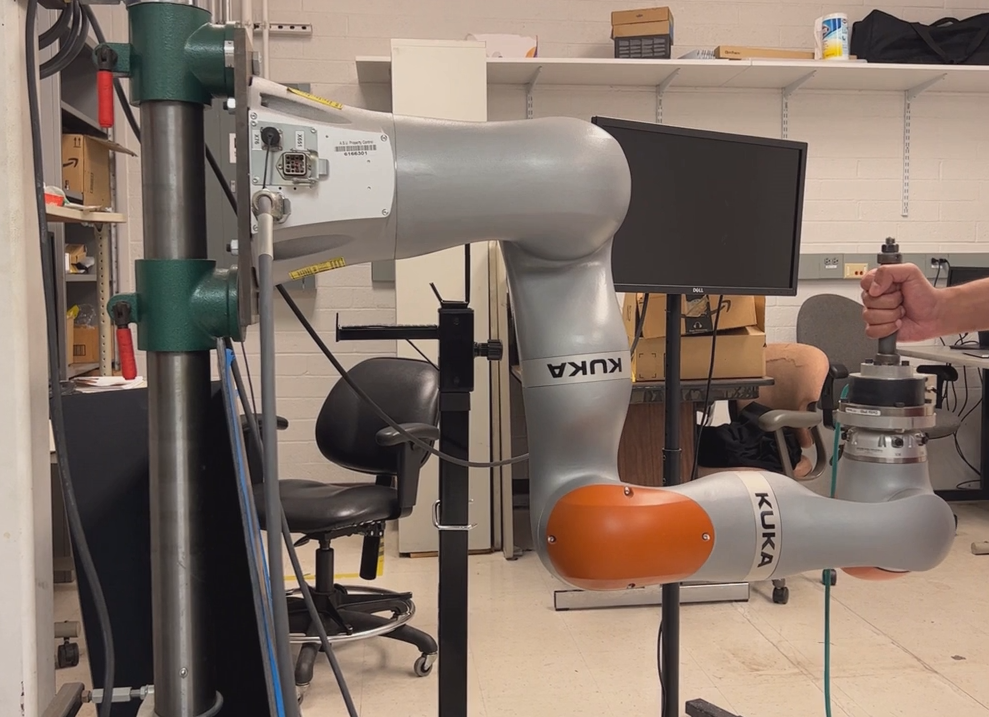
KUKA LBR iiwa 14 Hardware Demo
Work
- Implemented 3 real-time motion control algorithms in C++, and path planning using MoveIt on LBR iiwa KUKA robot arm with ROS hardware interface plugin via TCP/IP over ethernet.
- Developed an Admittance Control algorithm for 1kHz human-robot interaction using an ATI EtherCAT F/T sensor to read interaction forces at the robot end-effector and "TRAC-IK" to compute inverse kinematics for robot joint control.
- Created Ubuntu Docker image for amd64 and arm64 for easy ROS and EtherCAT communication setup and knowledge transfer.
- Working on integrating the control algorithm in ROS with Unity game engine to be deployed on Microsoft Hololens, to build an AR platform for rehabilitation.
Videos and Images
KUKA Robot arm: